
By Florengen Arvin Parulan (Automotive Researcher)
Modern vehicles are rapidly evolving into connected digital systems driven by embedded electronics and complex in-vehicle networks. As connectivity expands, engineers face the challenge of developing and testing these systems safely and affordably.
The Resistant Automotive Miniature Network (RAMN) addresses this need. It is a credit card-sized, open-source platform for hands-on learning, prototyping, and cybersecurity research in automotive embedded systems.
What is RAMN
Developed by Toyota InfoTech, the RAMN is a miniature printed circuit board (PCB) testbed that replicates a small but realistic automotive network of four electronic control units (ECUs) communicating over a shared CAN/CAN-FD bus. It is fully open source, both in hardware and software, and designed for accessibility and extensibility.
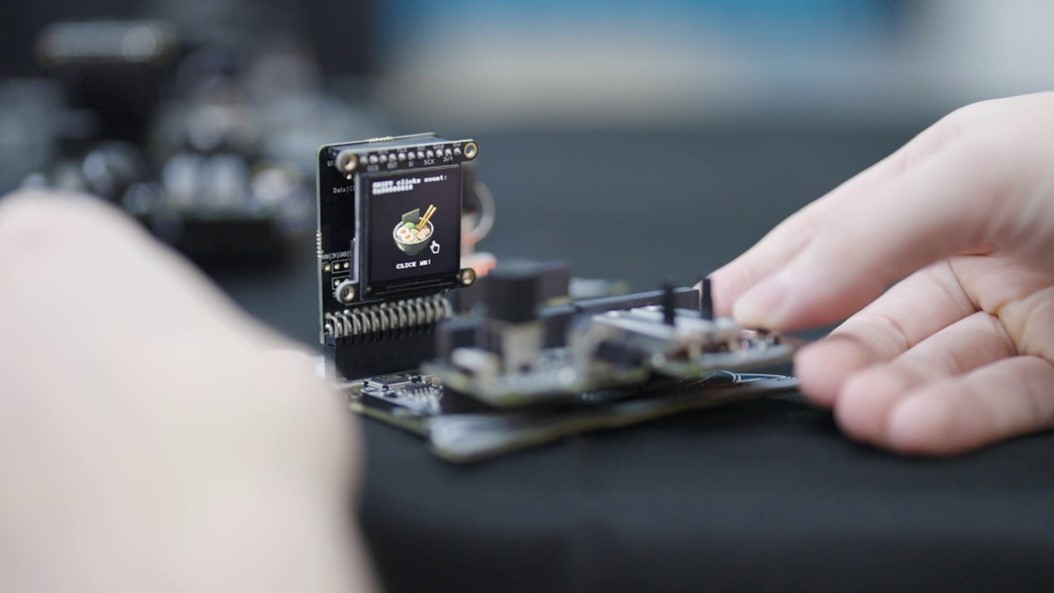
Figure 1. One of the RAMN setups in Automotive CTF 2024
Educators use it to teach ECU communication and diagnostics, researchers employ it for safe replication of attack scenarios, and developers leverage it for firmware prototyping and diagnostics testing. By lowering barriers to entry, RAMN bridges the gap between theoretical study and practical application, helping security researchers, engineers, and even students explore the communication and security layers that define modern vehicles.
Security in simulation and CTF competitions
Beyond academic and prototyping use, RAMN has also become a key platform for cybersecurity training and competitions. Its open and modular framework has powered international automotive Capture the Flag (CTF) events, including DEF CON’s Car Hacking Village, Automotive CTF 2024, and the 2025 Global Vehicle Cybersecurity Competition, a joint initiative launched by VicOne and Block Harbor. 
Figure 2. The Automotive CTF 2024 finalists, along with executives from VicOne and Block Harbor, at the awarding ceremony in Detroit.
These events empower participants to perform diagnostics, fuzzing, and exploit development in a safe environment.
How RAMN works
Hardware design
RAMN’s hardware design is compact yet complete. Its four ECUs, typically representing gateway (ECU A), chassis (ECU B), powertrain (ECU C), and body modules (ECU D), each contain a dedicated microcontroller, CAN-FD transceiver, and power supply. The ECUs share a common CAN bus with proper termination and exposed test points, allowing users to observe or inject signals directly.
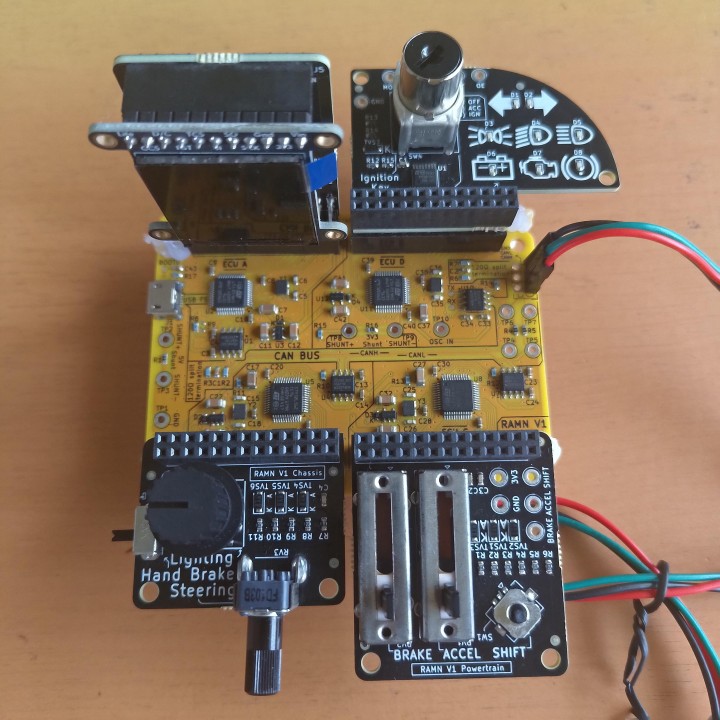
Figure 3. A RAMN board featuring ECUs that replicate real-world in-vehicle communications
Software framework
Complementing its hardware, RAMN’s modular firmware mirrors the logic of production ECUs while remaining fully customizable. All ECUs share a common codebase, with specific behaviors defined at compile time. Developers can easily override handlers or extend functionality through user-defined hooks.
The firmware supports both classic CAN and CAN-FD, as well as USB for serial communication. Using the LAWICEL “slcan” protocol, RAMN appears as a standard USB-to-CAN adapter compatible with analysis tools such as Wireshark, python-can, or SavvyCAN. Diagnostic services based on Unified Diagnostic Services (UDS) allow each ECU to respond to realistic diagnostic queries.
Together, RAMN’s compact hardware and modular firmware replicate real-world ECU behavior, creating a secure environment for rapid prototyping and network experimentation.
Protocols and communication capabilities
RAMN supports the same communication standards found in production vehicles, including:
- Classic CAN: Up to 1 Mbps with payloads of 8 bytes; typically used for status messages and diagnostics
- CAN-FD: Up to 8 Mbps with payloads of 64 bytes; ideal for higher-bandwidth experiments
- ISO-TP: Enables transmission of longer payloads through message segmentation and reassembly.
RAMN users can toggle between protocols, adjust bit rates, and observe how timing and arbitration affect network performance — all without altering hardware components.
RAMN meets CARLA: Bridging real and virtual worlds
One of RAMN’s most compelling features is its integration with CARLA, the leading open-source autonomous-driving simulator built on Unreal Engine. Together, they form a hardware-in-the-loop environment where physical and virtual systems exchange data in real time.
How the integration works
- Physical to virtual. Actions performed on the RAMN, such as turning a knob or toggling a sensor input, generate CAN messages that CARLA interprets to update a vehicle’s virtual state.
- Virtual to physical: CARLA’s control algorithms can trigger USB commands that RAMN translates into CAN messages, activating LEDs or actuators on the board.
This two-way feedback loop allows developers to test embedded software and control logic in a safe, repeatable manner. Engineers can observe how sensor noise, timing delays, or manipulated messages influence vehicle behavior, all within a simulated city environment.
Setting Up CARLA for RAMN testing
RAMN’s integration utilities make it straightforward to link the physical board to CARLA’s virtual environment. The flow is simple: install CARLA, set up the Python API, add the RAMN scripts, then choose serial (recommended) or CAN mode to connect.
Prerequisites
- Hardware: A CUDA-capable GPU for smooth CARLA rendering (e.g., NVIDIA RTX 3070/3080 or better)
- Software: Windows 11 or Ubuntu 22.04, Python 3.8+
Steps in setting up CARLA
1. Install CARLA. Download the latest binary or release from the official CARLA repository.
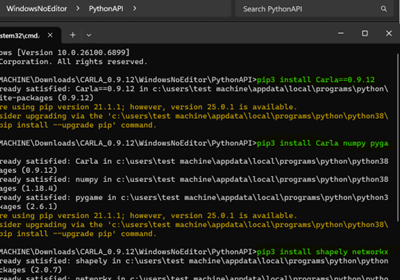
2. Configure the Python environment.
- Install the required Python modules:
pip install carla numpy pygame
pip install carla==XX.XX.XX (python CARLA version) - For self-driving experiments: pip install shapely networkx
3. Add the RAMN integration scripts.
- Clone or download the RAMN repository and install its dependencies.
run pip install -r requirements.txt - Specify the CARLA executable path found in RAMN/Script/Settings: CARLA_PATH.txt
4. Start the CARLA server.
- Run 0_CARLA_SERVER_start.bat in Windows or the corresponding .sh script in Linux.
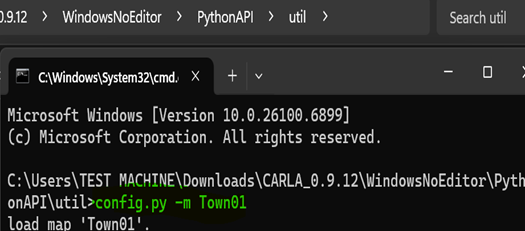
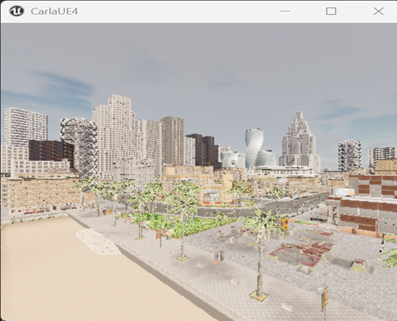
- Configurable options include resolution, graphics quality, and map selection. Locate CARLAS’s PythonAPI/UTIL and run config.py –m XX. For low resolution: CarlaUE4.exe -dx11 -windowed -quality-level=Low
5. Connect RAMN to CARLA. Select a mode based on your test goals:
- Serial mode (recommended for performance)
Manual control: 2_CARLA_RAMN_manual_serial.bat
AI control: 3_CARLA_RAMN_auto_serial.bat - CAN mode
Manual control: 4_CARLA_RAMN_manual_CAN.bat
AI control: 5_CARLA_RAMN_auto_CAN.bat
Use your preferred analyzer to confirm bidirectional traffic (e.g., python-can, Wireshark). You should see CARLA’s simulated events appearing as CAN messages on RAMN, while any physical inputs on the RAMN board simultaneously update the vehicle’s behavior in the simulator.
Benefits for research and education
Integrating RAMN with CARLA offers a cost-effective alternative to full-scale vehicle testing. Students can visualize how digital commands translate into physical actions, while security researchers can safely simulate and study cyberattack scenarios.
These workflows create a full development loop: prototype on the RAMN board, simulate behavior in CARLA, analyze traffic in real time, and refine firmware iteratively. Such accessibility makes the platform ideal for academic labs, research institutions, and security teams seeking repeatable testing environments.
Why RAMN matters for automotive cybersecurity
Modern vehicles rely on dozens of ECUs and millions of lines of code that communicate across shared networks — making every connection a potential attack surface. RAMN provides engineers and researchers with a safe, practical way to study how vulnerabilities propagate and to validate their countermeasures accordingly.
Its open-source framework allows users to extend functionality with intrusion detection, message authentication, or other security algorithms. When paired with CARLA, RAMN bridges physical experimentation with virtual simulation, creating an environment to explore how attacks can originate from or target connected vehicles.
Ultimately, RAMN is more than a testbed. It represents a shift in how the automotive cybersecurity community approaches embedded-system security and education. By making complex testing environments accessible to anyone with curiosity and technical drive, it accelerates innovation and strengthens the foundations of secure, intelligent mobility.



